วันนี้เราจะมานำเสนอเรื่องราวของทีมวิศวกรของเราที่ได้พัฒนา 3rd Payload หรือ เพย์โหลดที่ 3 ได้สำเร็จและพร้อมที่จะส่งไปทดสอบในสภาวะแวดล้อมอวกาศในขั้นตอนต่อไป
เริ่มจากการที่ทีมวิศวกรได้เรียนรู้และฝึกฝน ทดสอบประกอบชิ้นส่วนดาวเทียม ตั้งแต่กระบวนการวิเคราะห์ความต้องการลูกค้า (Derive requirement) จนนำไปสู่การวางแผนรวบรวมข้อมูลการออกแบบ และข้อมูลเชิงเทคนิค เพื่อให้ตอบโจทย์ requirement นั้น
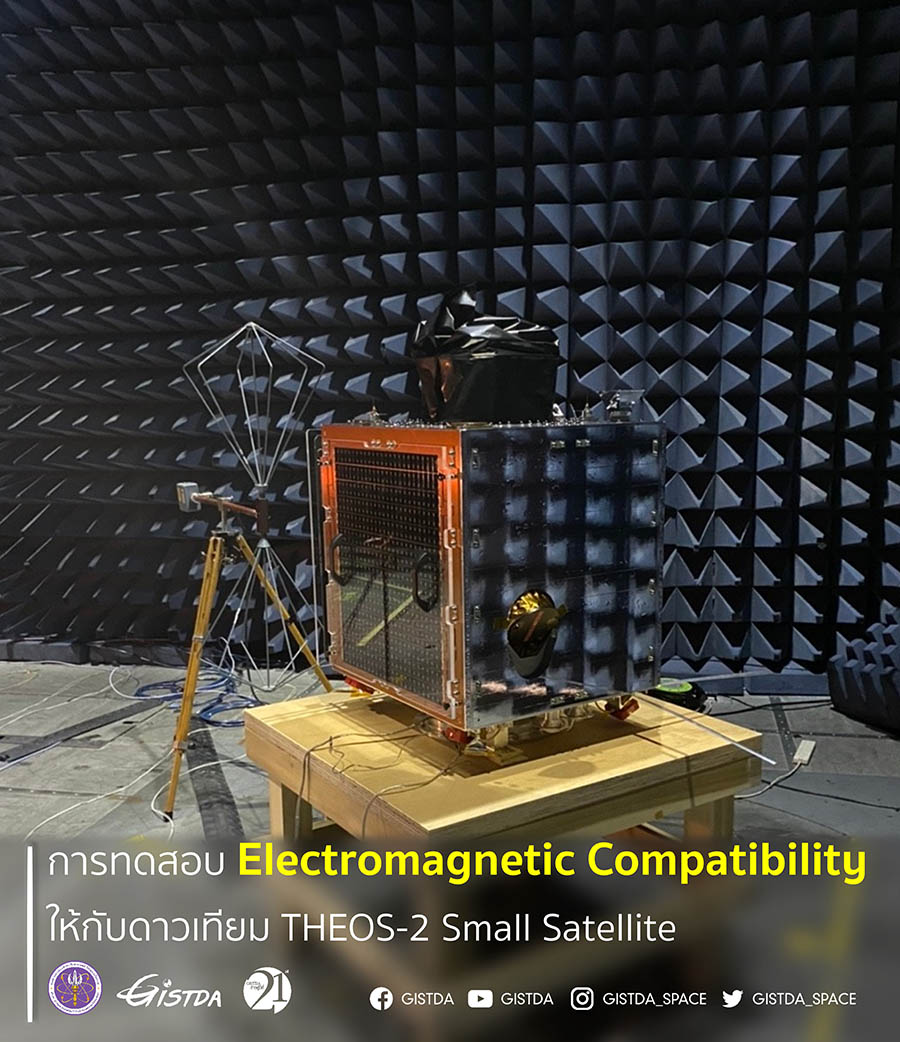
ต่อจากนั้นก็ได้เริ่ม ภารกิจสำรวจโลกด้วยดาวเทียม THEOS-2 SmallSAT ทีมวิศวกร ได้ฝึกฝนและลงมือปฏิบัติจริงกับ เพย์โหลดที่ 1 ซึ่งเป็นเพย์โหลดเกี่ยวกับการถ่ายภาพ และ เพย์โหลดที่ 2 จะเป็นอุปกรณ์ตรวจจับสัญญาณเรือ และเครื่องบิน ดังนั้นเพื่อตอบโจทย์ requirement อีกหนึ่งข้อของดาวเทียมดวงนี้ก็คือ technology transfer ซึ่งเพย์โหลดที่ 1 และ 2 มีการออกแบบ และใช้งานบนอวกาศมาบ้างแล้ว หรือที่เรียกว่า flight heritage
ดังนั้น เพื่อเป็นการพิสูจน์ Flight heritage ของวิศวกรไทยในครั้งนี้ ทางบริษัท SSTL จึง ได้มอบหมายภารกิจที่สำคัญให้กับทีมวิศวกรของเราทำการออกแบบ เพย์โหลดที่ 3 โดยเปิดโอกาสให้สามารถแสดงความคิด และออกแบบได้อย่างอิสระ ภายใต้ข้อจำกัดทางเทคนิค เช่น ขนาด น้ำหนัก ปริมาณข้อมูล ระยะเวลาในการใช้งานบนอวกาศ เป็นต้น
โดยทีมวิศวกร ตัดสินใจที่จะใช้ Raspberry Pi บอร์ด ที่เป็นบอร์ดเอนกประสงค์ จำลองให้เป็นสมองกลการสั่งงานของดาวเทียมจิ๋ว และทำงานร่วมกับ sensor อื่นๆ เช่น กล้อง อุปกรณ์นำทาง GNSS อุปกรณ์ Inertial Measurement Unit (IMU) ที่ประกอบไปด้วย sensor วัดความเร่ง (Accelerometer) วัดความเร็วแนวแกน (Gyro) และวัดสนามแม่เหล็กโลก (Magnetometer) และสุดท้ายเป็นอุปกรณ์วัดมุมพระอาทิตย์ (Sun sensor) ทั้งนี้ Sun sensor จะมี 2 ชุด ชุดแรกซื้อมาแบบที่เป็น Flight heritage เป็นรุ่นที่เคยใช้บนอวกาศในภารกิจอื่น ๆ ที่ผ่านมาแล้ว และอีกหนึ่งชุด ทีมวิศวกร ได้ทำการออกแบบและพัฒนาขึ้นเอง
จากนั้นนำอุปกรณ์ทั้งหมดนี้ประกอบเข้าด้วยกัน โดยกำหนดให้มีการทำงานทั้งหมด 6 โหมด ดังนี้
1. การถ่ายภาพบนพื้นโลก แบบ Strip หรือ หลายภาพในเวลาสั้นๆ
2. การถ่ายภาพบนพื้นโลก แบบ Single short หรือ ถ่ายหนึ่งชัตเตอร์
3. การถ่ายภาพบนพื้นโลก แบบ วิดีโอ
4. การถ่ายภาพดาวเทียมซึ่งจะเห็นสายอากาศ X-band
5. การทดลองใช้ sensor ต่างๆ ยกเว้นกล้อง เพื่อประเมินประสิทธิภาพ Sensor การอ่านค่าการทรงตัวของดาวเทียม
6. การอัพเดทซอฟต์แวร์กรณีมีการแก้ไขระหว่างดาวเทียมปฏิบัติการบนอวกาศ
ปัจจุบัน 3rd payload ได้ประกอบเข้ากับดาวเทียมเป็นที่เรียบร้อยแล้ว และพร้อมที่จะทดสอบในสภาวะแวดล้อมอวกาศ ซึ่งมีกำหนดการทดสอบประมาณเดือน มิถุนายน - สิงหาคม 2564